Friday, September 30. 2005
Sigh, the new hovercraft isn't floating
Monday, September 26. 2005
New hovercraft is almost ready!
Sunday, June 5. 2005
More speed more power
Tuesday, February 15. 2005
Cluster Run
The cluster is running my old mpi-prime code to get it all tested and working nicely. You can view the bandiwdth graphs at http://www.crepinc.com/cluster/. You can see the nice bandwidth spike, then the inverse exponential curve as the bandwidth decreases because it takes longer to find each number and request a new one. Take note, Doorstop04 is not involved in this test because I need to update LibC first (yes, it’s THAT old 
Sunday, January 2. 2005
The RC plane works!
Three years ago, my parents bought me a Dynaflight Piece 'O Cake RC plane kit. Basically, it comes as a box of small balsa sticks and a large printed drawing sheet. I'd spend two weeks working feverishly after school on it, then get distraught that it wasn't ready yet, not work on it for a few months, then come back to it.
When it was nearing the end, I decided to use a geared electric motor instead of the uncontrollable 0.049cc glow motor it was designed for. Looking back perhaps I should have built it to plans, as it would have been a very slow flying craft to learn on. With the weight of the battery and the much higher thrust of the motor system, it flew much faster than originally anticipated - so much so that it was uncontrollable at full throttle. However, it flew fine in the lower throttle ranges and would last a rather long time.
In any event, I took it to my friend Mike's house where there's a large field. Here are the pics:






And a few movies: good flight, landing, plane coming out of the tree.
When it was nearing the end, I decided to use a geared electric motor instead of the uncontrollable 0.049cc glow motor it was designed for. Looking back perhaps I should have built it to plans, as it would have been a very slow flying craft to learn on. With the weight of the battery and the much higher thrust of the motor system, it flew much faster than originally anticipated - so much so that it was uncontrollable at full throttle. However, it flew fine in the lower throttle ranges and would last a rather long time.
In any event, I took it to my friend Mike's house where there's a large field. Here are the pics:






And a few movies: good flight, landing, plane coming out of the tree.
Saturday, November 6. 2004
The Balancing Bot
I was looking around for a new project one day, when nBot caught my attention. I knew that balancing robots were hard (look how much the segway costs!), but the more I thought, the more I knew I had to try. [pics missing]
I am yet to have it balance indefinatly, at which point I will write a whole paper about doing this. However right now, I will just list the various versions, and how well they worked.
Version 1
This was (obviously) the first version. It was about 4 feet tall. I found that my motors move way too slowly to keep a bot this size up. Thus we went to the next version.
Version 2
I chopped off about a foot and a half, so the bot is now 2 and a half feet. I figured that the bot would be able to right itself better since the moment arm is shorter, thus the same linear speed is a much faster angular speed. It now stands for about 10 seconds, but inevitably still falls.
Version 2.5
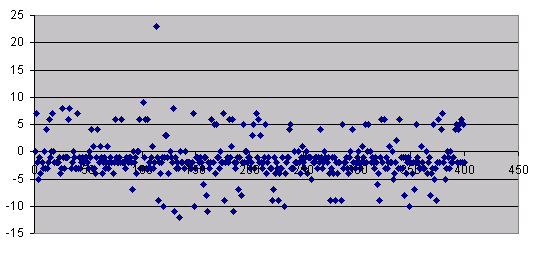
I found that the problems were due to inaccurate readings in the IR sensors. So I made a running array of the last 8 values, and used the average of them for the calulation. This didn’t quite work, either. Look at these graphs:
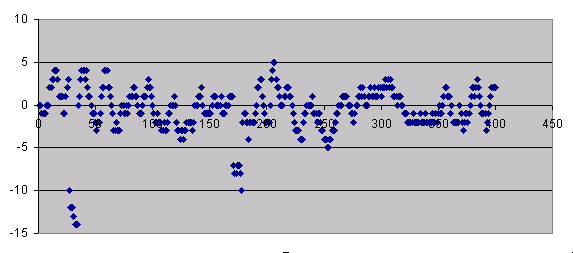
For both of these tests, the IR sensor was stationary in a vise pointed at a wall. That should give you some idead how inaccurate it is. The first is without my fix:
And with the fix:
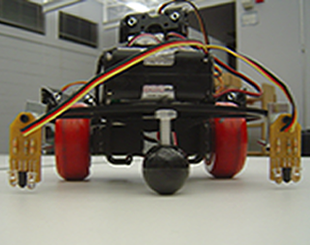
Version 3
I gave up on the IR sensors: now I’m using sonar. It’s much more accurate, but I only have one. So the bot now balances for about 20 seconds, but the wheels simply can’t go fast enough to catch up if it gets moving more than a few inches per second. I hope to make some new wheels today.
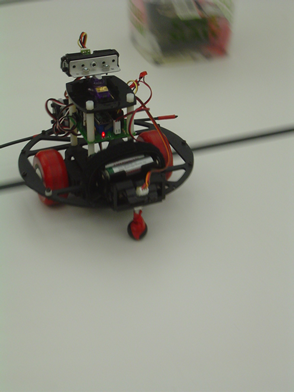
Version 3.1
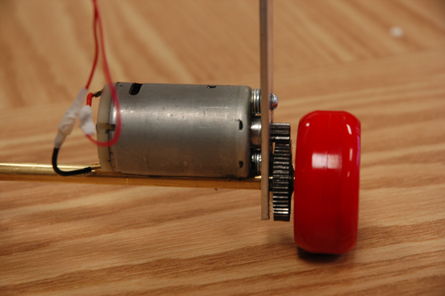
I ran over to the wood shop (we don’t have a metal shop) and made some bigger wheels… it seemed to me that the servos had quite a bit of torque, but didn’t go fast enough. Thus, increase the radius, we increase the distance traveled per revolution.
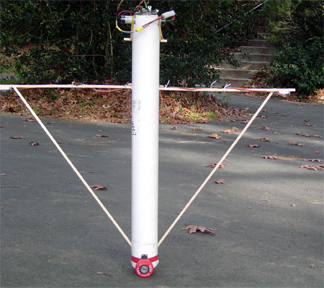
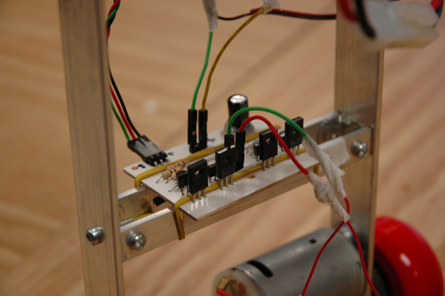
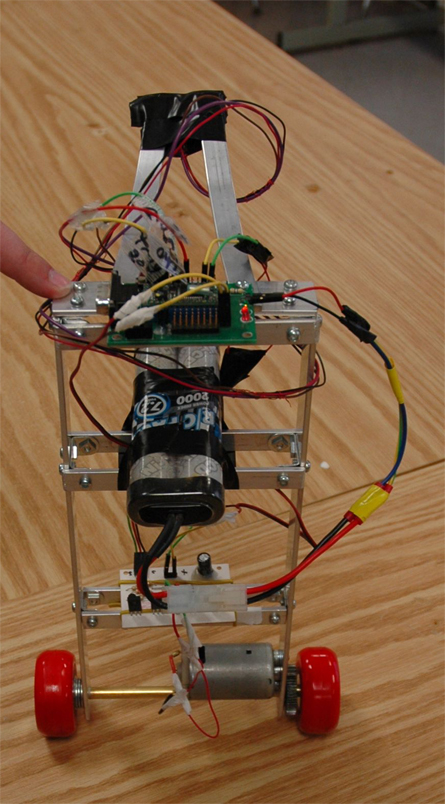
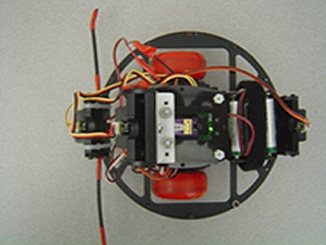
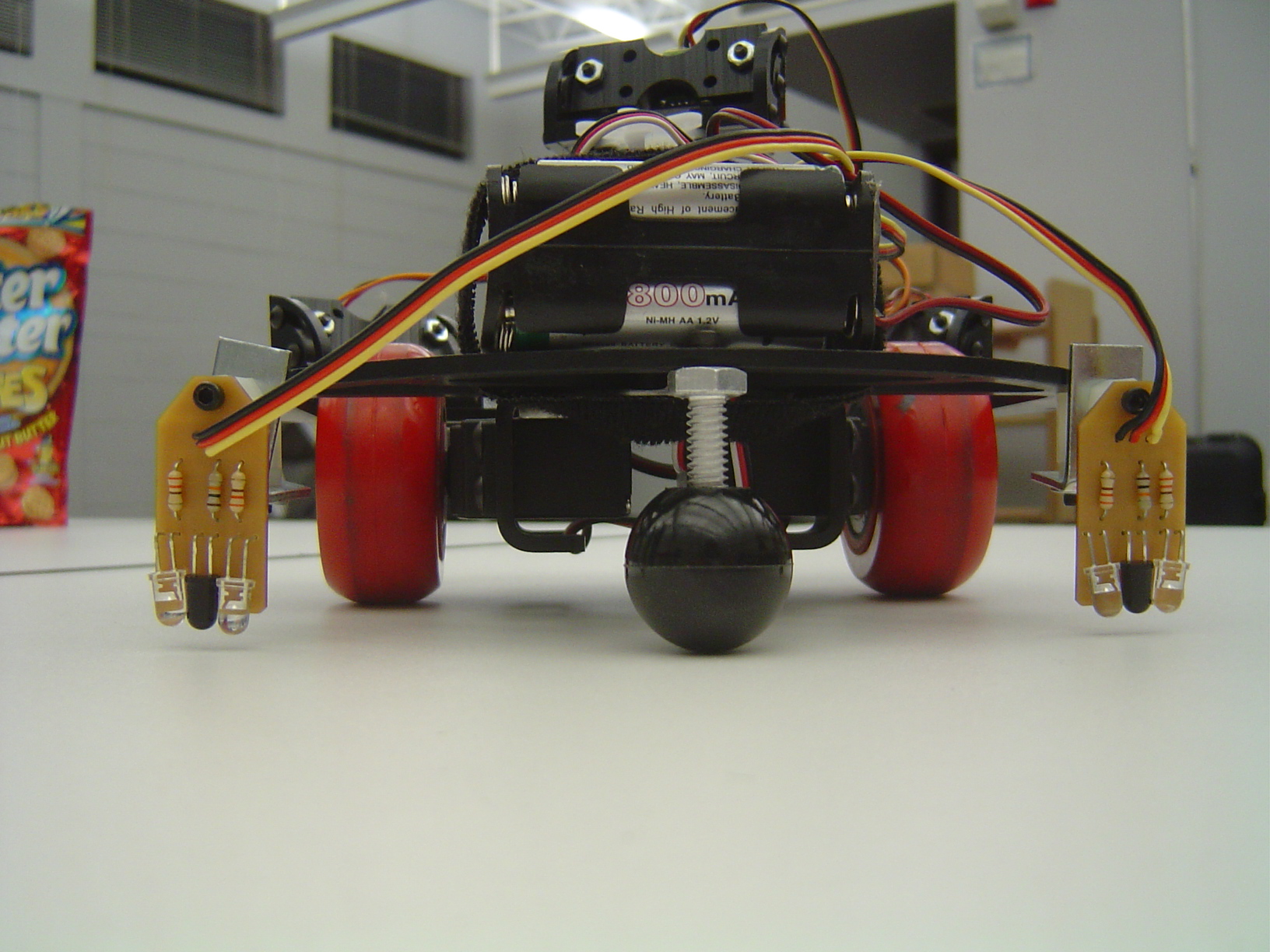
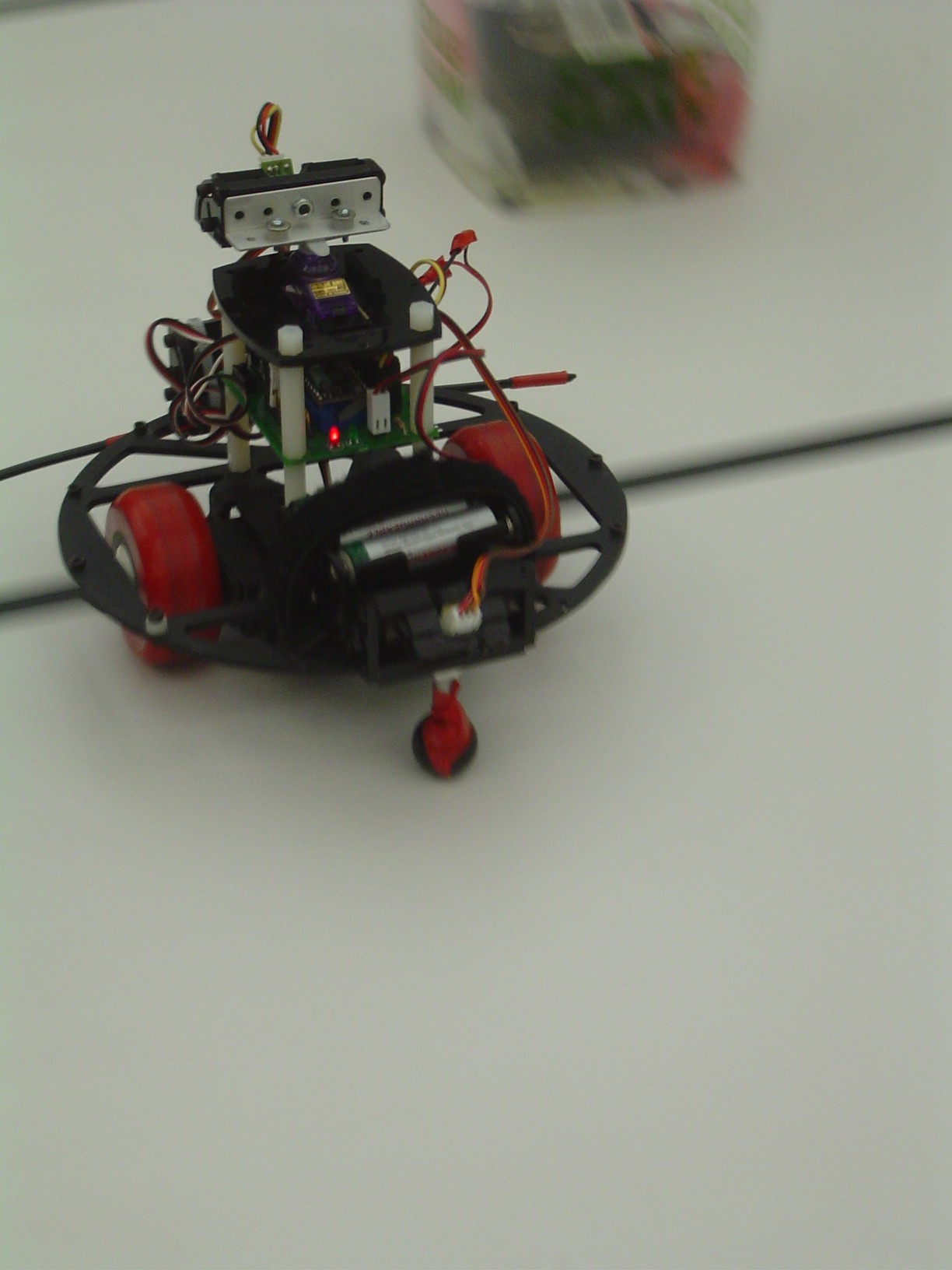
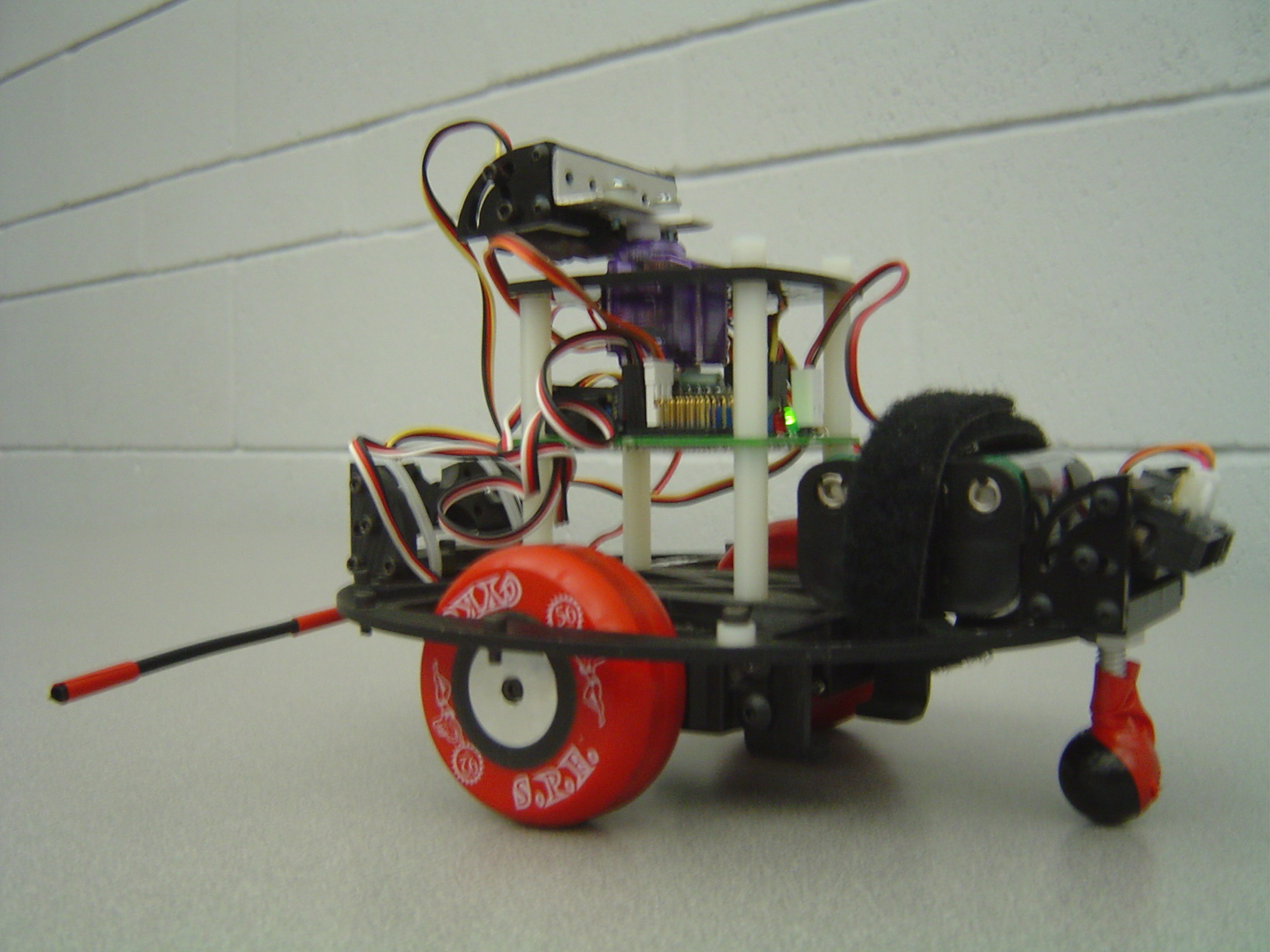
Version 4.0
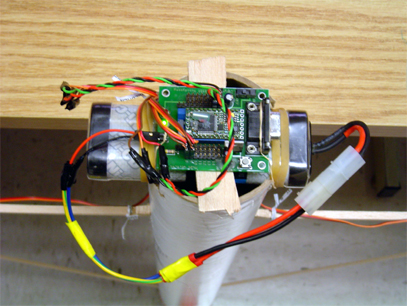
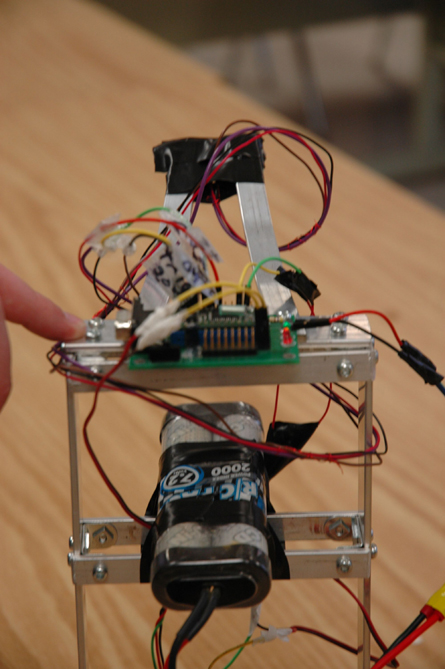
The whole bot has been completly redesigned. The wheels of wood were not prefectly true, and thus wobbled way too much to balance properly. Also, the body was not ideal, the motors weren’t good enough, it was too tall, heavy in the wrong places….
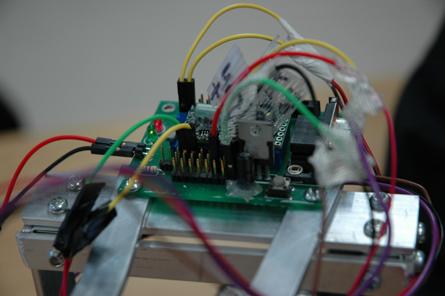
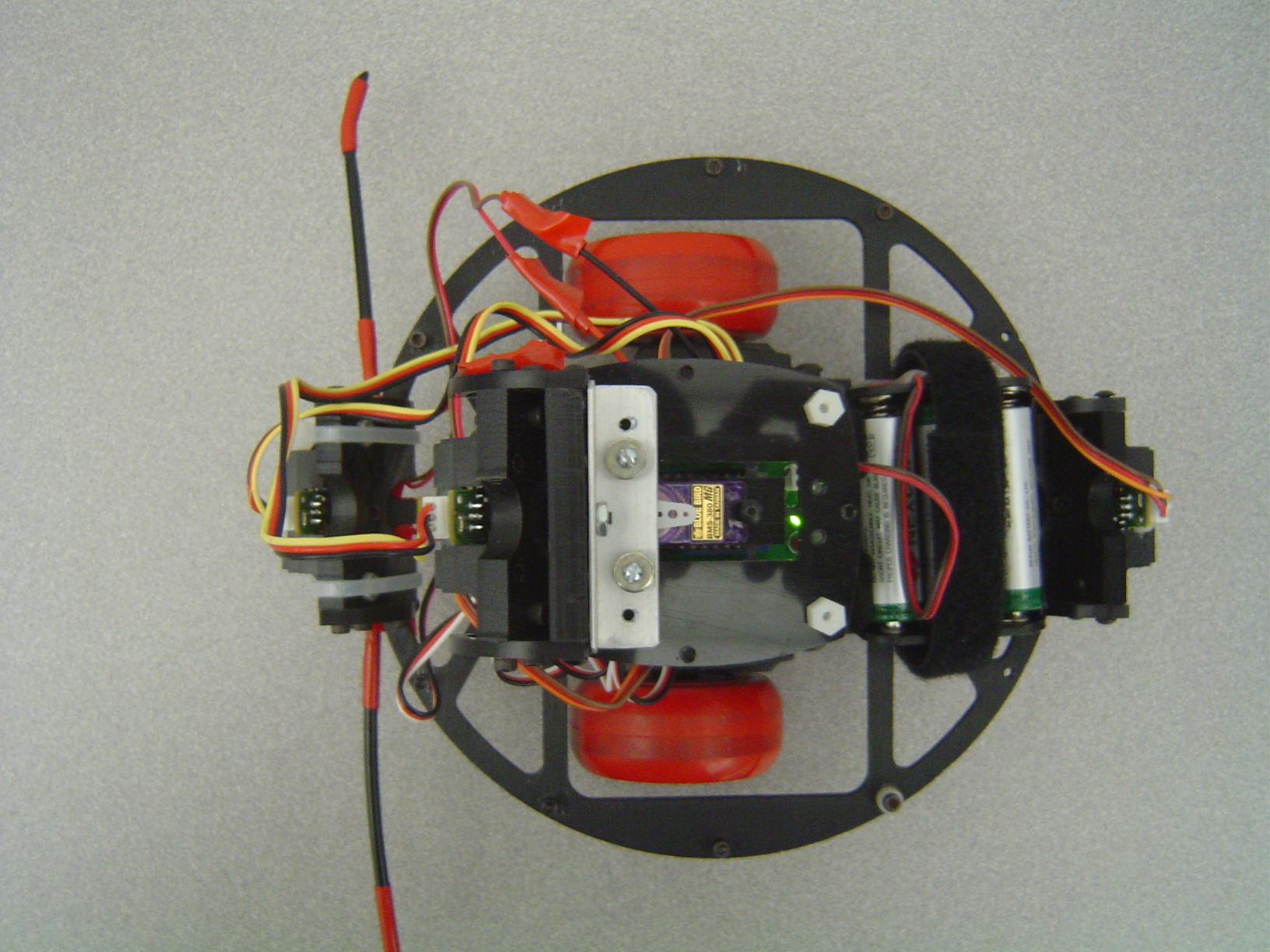
This new bot has been designed completly in aluminum. (And crafted with nothing more than a jigsaw and a drill, plus some Erector set peices.) Yet still, it’s nicer than the previous models. It balanced nicely, has a large electric drill motor and sonar.
I am yet to have it balance indefinatly, at which point I will write a whole paper about doing this. However right now, I will just list the various versions, and how well they worked.
Version 1


This was (obviously) the first version. It was about 4 feet tall. I found that my motors move way too slowly to keep a bot this size up. Thus we went to the next version.
Version 2
I chopped off about a foot and a half, so the bot is now 2 and a half feet. I figured that the bot would be able to right itself better since the moment arm is shorter, thus the same linear speed is a much faster angular speed. It now stands for about 10 seconds, but inevitably still falls.
Version 2.5
I found that the problems were due to inaccurate readings in the IR sensors. So I made a running array of the last 8 values, and used the average of them for the calulation. This didn’t quite work, either. Look at these graphs:
For both of these tests, the IR sensor was stationary in a vise pointed at a wall. That should give you some idead how inaccurate it is. The first is without my fix:
And with the fix:
Version 3
I gave up on the IR sensors: now I’m using sonar. It’s much more accurate, but I only have one. So the bot now balances for about 20 seconds, but the wheels simply can’t go fast enough to catch up if it gets moving more than a few inches per second. I hope to make some new wheels today.
Version 3.1
I ran over to the wood shop (we don’t have a metal shop) and made some bigger wheels… it seemed to me that the servos had quite a bit of torque, but didn’t go fast enough. Thus, increase the radius, we increase the distance traveled per revolution.
Version 4.0
The whole bot has been completly redesigned. The wheels of wood were not prefectly true, and thus wobbled way too much to balance properly. Also, the body was not ideal, the motors weren’t good enough, it was too tall, heavy in the wrong places….
This new bot has been designed completly in aluminum. (And crafted with nothing more than a jigsaw and a drill, plus some Erector set peices.) Yet still, it’s nicer than the previous models. It balanced nicely, has a large electric drill motor and sonar.
Tuesday, October 5. 2004
Robotics Competition
Here are a few pics from our robotics comp last weekend!





Wednesday, September 22. 2004
The Trebuchet
After returning from Europe, I decided that medieval siege weapons were much cooler than those of today. A friend and I had previously built a (sort of) working trebuchet, but we could only launch one brick about 5 feet before the thing colapsed upon itself. However, with a new found interest, and a book of pictures, we went about designing a new and improved trebuchet. [pics missing]
Update: The Trebuchet made a new record of 234 feet, and at the same time broke! But I hear it’s all better. See the bottom of the page for the pictures of the damage.
Video One
Video Two
As you may have noticed, most of the projects on this site seem to have been made with as little money as possible. This was the case here. The original trebuchet (we’re now in the 3rd build) was crafted with a bucket and the duct tape, asagging too-small rod, etc. The 2×4′s in the boom and the stand happened to be the only so-called “professional” matterials in the whole project. The cross braces were wooden stakes, the cradle was an old feed bag, the rope was as far as I can tell from one of those cheap volley ball nets. But hey, it worked. The latest version, however, is a bit better. Real wood is used, as well as a very strong cross rod. Standing over 24 feet tall, it’s truly a work of art.
The principle of the trebuchet is simple: a weight on one end will make the other end lift, and inertia will cary whatever was there forward. It is much like a catapult, except that rather than storing energy in a bent tree, we store it in the process of lifting the weight up. The weight goes on the shorter end, so the other end swings faster. Our weight was a spackle bucket filled with rocks, coal, and water. (Don’t get the idea that coal is amazing for this purpose; my friend simply had some lying around.)
Though not attached in the picture, there is another peice that adds momentum to the launched object. The sling swings out from underneth during launch, thus adding more inertia. The hook (which the log is sitting on…. it works just to launch stuff by itself.) lets go of one side of the sling at just the right momment (theoretically) so that the object goes flying. We were unable to make our sling detach at the right momment, so we stuck stuff on the hook. However, this is an ongoing project, and it will work sometime soon.
Pictures (Click on any to get the full size!)
The first version! Pretty strange, eh?

The next version: 1.8

Version 2. Note the new side bracing:



Version 3! The final and coolest.
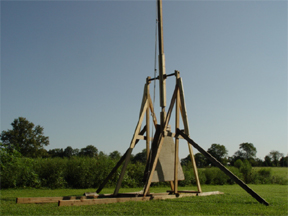
A nice view of V3:

And the moment you’ve been waiting for! These are the pics of the damage the took place during a record-breaking 243 foot launch.



Despite a few setbacks, and a lack of good materials the first time, we still made this thing work! As I said, we will continue to work on it. Any crazy ideas, etc, make sure to drop a line by way of email or replies!
Update: The Trebuchet made a new record of 234 feet, and at the same time broke! But I hear it’s all better. See the bottom of the page for the pictures of the damage.
Video One
Video Two
As you may have noticed, most of the projects on this site seem to have been made with as little money as possible. This was the case here. The original trebuchet (we’re now in the 3rd build) was crafted with a bucket and the duct tape, asagging too-small rod, etc. The 2×4′s in the boom and the stand happened to be the only so-called “professional” matterials in the whole project. The cross braces were wooden stakes, the cradle was an old feed bag, the rope was as far as I can tell from one of those cheap volley ball nets. But hey, it worked. The latest version, however, is a bit better. Real wood is used, as well as a very strong cross rod. Standing over 24 feet tall, it’s truly a work of art.
The principle of the trebuchet is simple: a weight on one end will make the other end lift, and inertia will cary whatever was there forward. It is much like a catapult, except that rather than storing energy in a bent tree, we store it in the process of lifting the weight up. The weight goes on the shorter end, so the other end swings faster. Our weight was a spackle bucket filled with rocks, coal, and water. (Don’t get the idea that coal is amazing for this purpose; my friend simply had some lying around.)
Though not attached in the picture, there is another peice that adds momentum to the launched object. The sling swings out from underneth during launch, thus adding more inertia. The hook (which the log is sitting on…. it works just to launch stuff by itself.) lets go of one side of the sling at just the right momment (theoretically) so that the object goes flying. We were unable to make our sling detach at the right momment, so we stuck stuff on the hook. However, this is an ongoing project, and it will work sometime soon.
Pictures (Click on any to get the full size!)
The first version! Pretty strange, eh?

The next version: 1.8

Version 2. Note the new side bracing:


Version 3! The final and coolest.

A nice view of V3:

And the moment you’ve been waiting for! These are the pics of the damage the took place during a record-breaking 243 foot launch.



Despite a few setbacks, and a lack of good materials the first time, we still made this thing work! As I said, we will continue to work on it. Any crazy ideas, etc, make sure to drop a line by way of email or replies!
The Cluster
Monday, September 13. 2004
Trebuchet gone out with a blast
Email me:
jack {@} crepinc.com
Recent Projects:
Analog HF Transmitter
Audi ECU Reverse Engineering
Dual DAC QAM Modulator
FPGA QAM Modulator
Geiger Counter
Gyro-Stabilized DSLR Platform
Hybrid Rocket Engines
Turbocharger Controller
WWVB Rx and Tx
Older Projects:
Balancing Bot
Capacitor Array
CNC Mill
DCIR Renderer
Electric Gokart
Hovercraft
Low Alt. Temp. Model
Shopping Cart Locker
Trebuchet
My Twitter occasionally shows projects I'm working on.
My GitHub has code from a few projects on it.
jack {@} crepinc.com
Recent Projects:
Analog HF Transmitter
Audi ECU Reverse Engineering
Dual DAC QAM Modulator
FPGA QAM Modulator
Geiger Counter
Gyro-Stabilized DSLR Platform
Hybrid Rocket Engines
Turbocharger Controller
WWVB Rx and Tx
Older Projects:
Balancing Bot
Capacitor Array
CNC Mill
DCIR Renderer
Electric Gokart
Hovercraft
Low Alt. Temp. Model
Shopping Cart Locker
Trebuchet
My Twitter occasionally shows projects I'm working on.
My GitHub has code from a few projects on it.